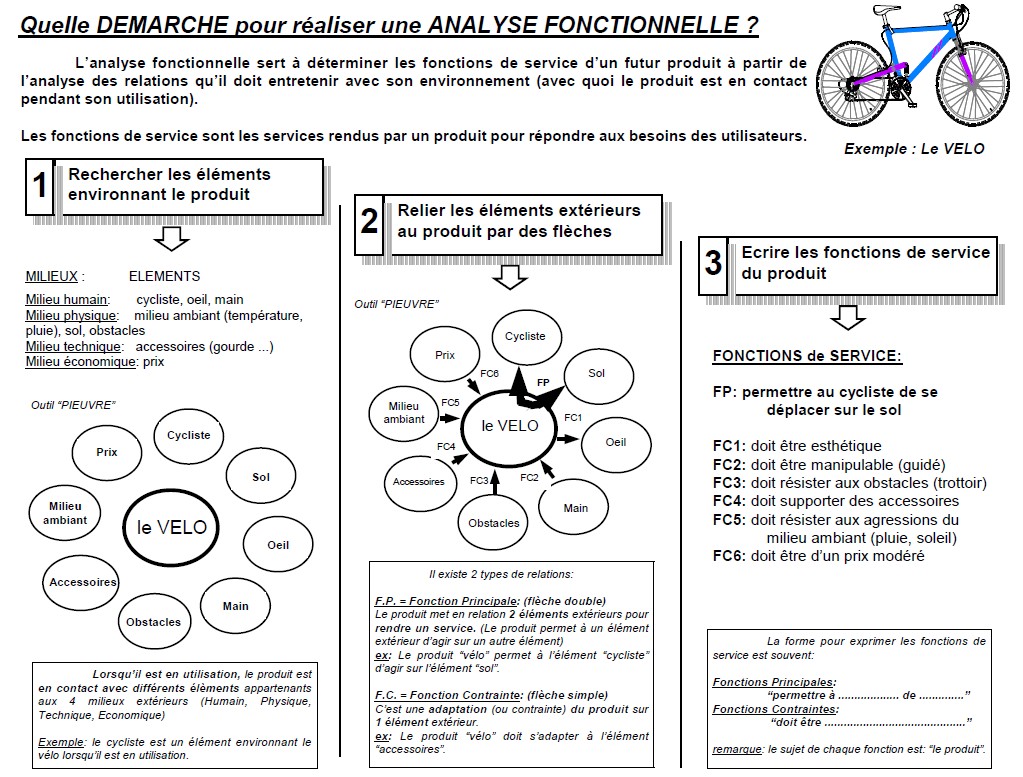
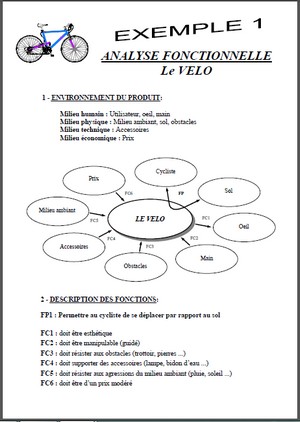
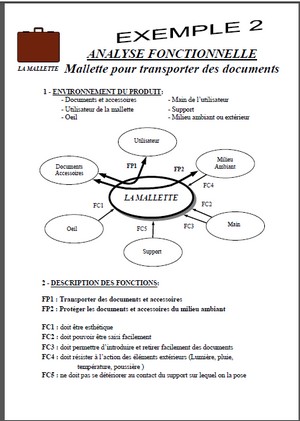
T2 Fonctions de service : diagramme des inter-acteurs (pieuvre) du robot explorateur
|
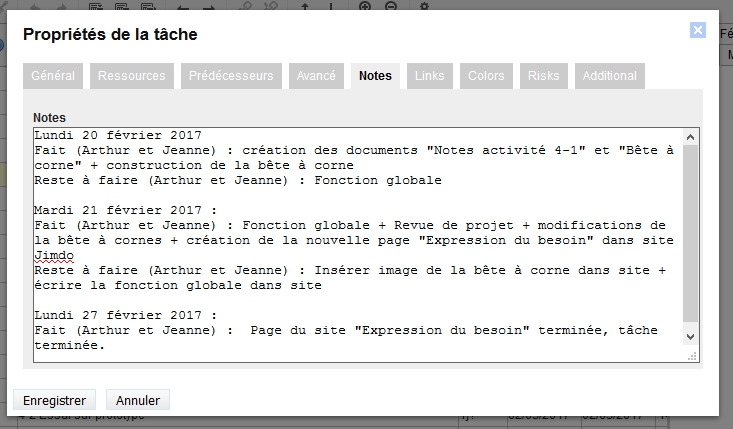
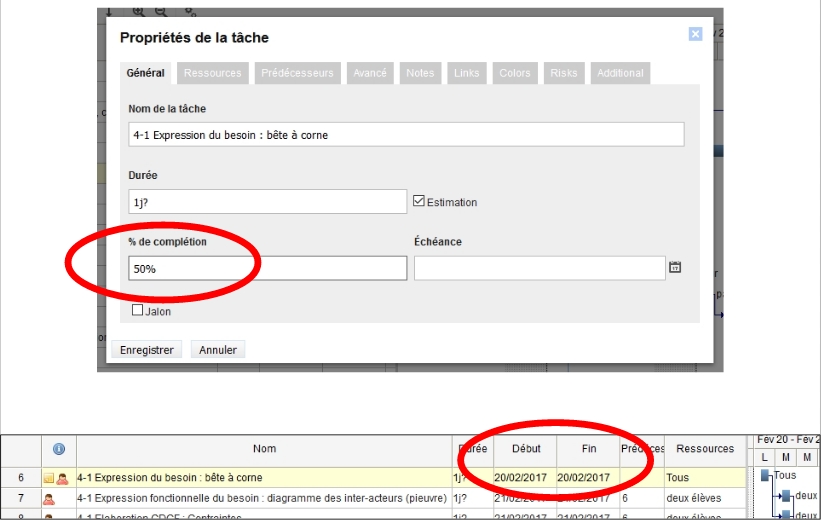
Tout le long du projet et à chaque fin de séance, vous devez tenir à jour le journal de bord dans le planning |
||
|
|
- noter dans les notes de cette tâche le travail réalisé chaque jour ainsi que le travail restant à faire. Voir modèle ci-contre - faire évoluer le % d'avancement (à vous de l'estimer) de cette tâche - de 0% (non commencée) jusqu'à 100% (tâche terminée). Voir ci-contre - mettre à jour les dates de début et fin de cette tâche. Voir ci-contre |
|
En îlot
|
1- Déterminer les composants qui entrent en contact avec le robot explorateur dans les quatre milieux (noter les réponses dans le document "Notes activité 4-1" situé dans le dossier partagé avec vos Drive "3emeYilotZ"). Voir Méthode de l'analyse fonctionnelle en ressources plus bas
|
|||||||||
|
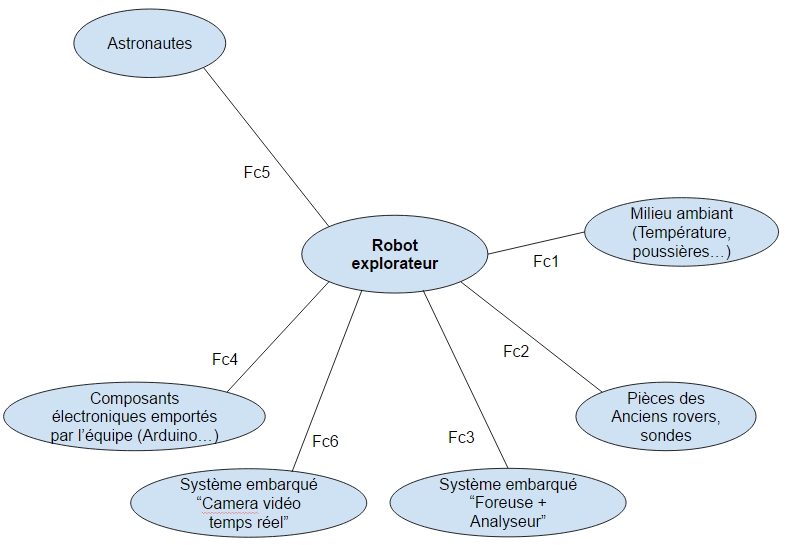
2- Compléter le diagramme des inter-acteurs (pieuvre) du robot explorateur à partir de vos réponses à la question précédente et en suivant les consigne suivantes :
|
 |
||||||||
|
3- Dresser la liste des fonctions de service (fonction(s) principale(s) et fonctions contraintes) (noter les réponses dans le document "Notes activité 4-1" situé dans le dossier partagé avec vos Drive "3emeYilotZ"). Voir Méthode de l'analyse fonctionnelle en ressources plus bas
|
|||||||||
|
4- Compléter le |
Ressources
Tutoriel Vidéo :
Au collège, visionner la vidéo depuis T/travail/TechnologiePC/3eme/Activité 4-1/googledrawings.mp4
| Méthode de l'analyse fonctionnelle | Exemples | |
 |
 |
 |
Besoin de revoir l'animation "La pieuvre ou diagramme des inter-acteurs" ?