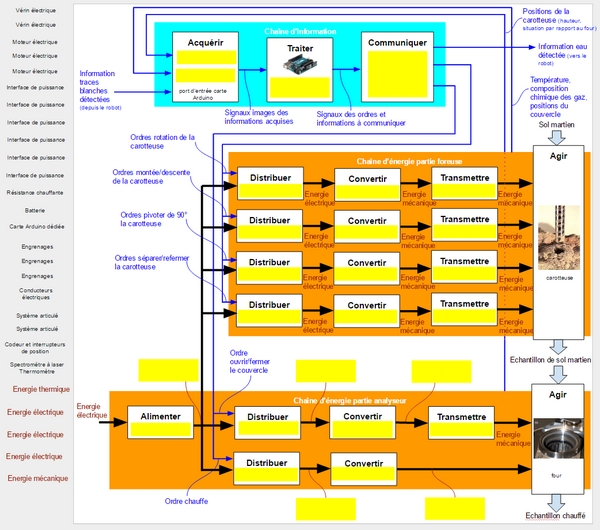
T11 Chaîne fonctionnelle du système embarqué "Foreuse + Analyseur"
|
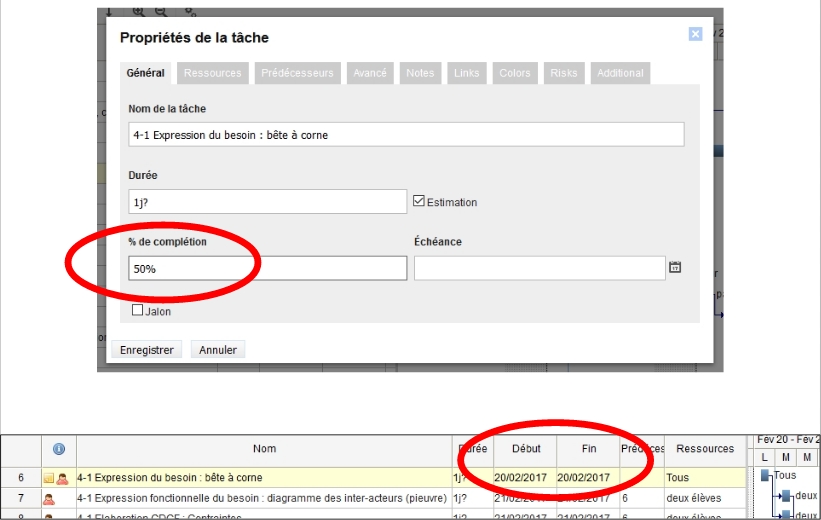
Tout le long du projet et à chaque fin de séance, vous devez tenir à jour le journal de bord dans le planning |
||
|
|
- noter dans les notes de cette tâche le travail réalisé chaque jour ainsi que le travail restant à faire. Voir modèle ci-contre - faire évoluer le % d'avancement (à vous de l'estimer) de cette tâche - de 0% (non commencée) jusqu'à 100% (tâche terminée). Voir ci-contre - mettre à jour les dates de début et fin de cette tâche. Voir ci-contre |
|
En îlot
|
1- Nommer les deux système embarqués que le robot explorateur doit contenir et expliquer leurs rôles (si nécessaire, un extrait du diagramme des inter-acteurs du prototype est donné en ressources plus bas |
|
|
2- Ouvrir le document google Drawings intitulé "Chaîne fonctionnelle système embarqué Foreuse + analyseur échantillon" situé dans le dossier 3emeXilotY partagé avec vos Drives. |
 |
|
3- A partir de la description du fonctionnement du système embarqué "Foreuse + Analyseur" donnée en ressources plus bas
|
|
|
4- Compléter le |
Ressources
Extrait du diagramme des inter-acteurs (pieuvre) du prototype :
Description du fonctionnement du système embarqué "Foreuse + Analyseur d'échantillons" :
- Lorsque le robot explorateur détecte une zone où il pourrait y avoir de l'eau dans le sol (traces blanches), la carte Arduino du système embarqué "Foreuse + Analyseur d'échantillon" reçoit une information "Traces blanches détectées" sur son port d'entrée en provenance de la carte Arduino du robot explorateur.
- La carte Arduino du système embarqué "Foreuse + Analyseur d'échantillon" traite cette information grâce au programme informatique qu'elle contient. Le programme impose alors de communiquer à la chaîne d'énergie de la foreuse l'ordre de forer le sol. Cet ordre est communiqué, via des câbles électriques, aux interfaces de puissances qui vont distribuer l'énergie électrique provenant de batteries aux différents actionneurs de la foreuse : un premier moteur électrique met en rotation la carotteuse via un système d'engrenages qui lui transmet l'énergie mécanique nécessaire et un premier vérin électrique assure la descente de la carotteuse via un système mécanique articulé. Le forage débute.
- Le codeur de position associé au vérin électrique permet à la carte Arduino d'acquérir la profondeur atteinte par la carotteuse en temps réel. Lorsque la carotteuse atteint la profondeur de forage de 15cm, le programme de la carte Arduino impose sa remontée. Cet ordre est communiqué via les câbles électriques à l'interface de puissances du premier vérin électrique qui va inverser la polarité de l'énergie électrique afin de remonter la carotteuse (la rotation de la carotteuse est maintenue durant sa remontée).
- Lorsque la carotteuse est remontée en position haute (information acquise par le codeur de position), le programme de la carte Arduino impose alors de pivoter la carotteuse au dessus du four de l'analyseur d'échantillon. Cet ordre est communiqué par des câbles électriques à une troisième interface de puissance qui va distribuer l'énergie électrique à un deuxième moteur électrique qui lui, via un système d'engrenages, va assurer la rotation de 90° de la carotteuse pour qu'elle se trouve au dessus du four. Simultanément, le moteur qui entraîne en rotation la carotteuse est arrêté (son interface de puissance reçoit l'ordre de la carte Arduino d'arrêter de lui distribuer de l'énergie) et le four est ouvert (le programme de la carte Arduino impose alors à une quatrième interface de puissance de distribuer l'énergie électrique à un troisième moteur électrique qui va provoquer, via des engrenages, l'ouverture du couvercle du four).
- Deux détecteurs de position permettent à la carte Arduino d'acquérir l'arrivée de la carotteuse au dessus du four et l'ouverture complète du four. Le programme de la carte Arduino impose alors l'arrêt du deuxième et du troisième moteur (leurs interfaces de puissance reçoivent l'ordre de la carte Arduino d'arrêter de leur distribuer de l'énergie) puis impose la séparation en deux de la carotteuse pour libérer l'échantillon. Cet ordre de séparation est communiqué via des câbles électriques à une cinquième interface de puissance qui va distribuer de l'énergie électrique à un deuxième vérin électrique pour provoquer, via un deuxième système articulé, la séparation de la carotteuse en deux dans le sens de la longueur.
- Un détecteur de position permet à la carte Arduino d'acquérir l'information "Carotteuse ouverte". Le programme de la carte Arduino impose alors la fermeture de la carotteuse (l'interface de puissance du deuxième vérin électrique reçoit l'ordre de la carte Arduino d'inverser la polarité de l'énergie électrique afin de refermer la carotteuse). Simultanément, le four est refermé (l'interface de puissance du troisième moteur reçoit l'ordre de la carte Arduino d'inverser la polarité de l'énergie électrique afin de refermer la couvercle). Deux autres détecteurs de position permettent à la carte Arduino d'acquérir les informations "carotteuse refermée" et "four fermé". Le programme de la carte Arduino impose alors l'arrêt du troisième moteur et du deuxième vérin électrique (leurs interfaces de puissance reçoivent l'ordre de la carte Arduino d'arrêter de leur distribuer de l'énergie).
- Le four étant fermé, la carte Arduino donne l'ordre à une sixième interface de puissance de distribuer l'énergie électrique à la résistance chauffante du four afin de maintenir dans son enceinte une température de 300°C pendant 10 minutes. Une sonde de température permet à la carte Arduino d'acquérir la température à l'intérieur du four et un spectromètre à laser lui permet d'acquérir la composition chimique des gaz contenus dans le four. Suivant la quantité d'Oxygène et d'Hydrogène présent dans les résultats reçu du spectromètre à laser, la carte Arduino communique, via des conducteurs électriques, le résultat positif ou négatif de la présence d'eau à la carte Arduino du robot explorateur.