Etape 4 - Recherche, sous forme de croquis, de solutions techniques pour la patte du prototype
|
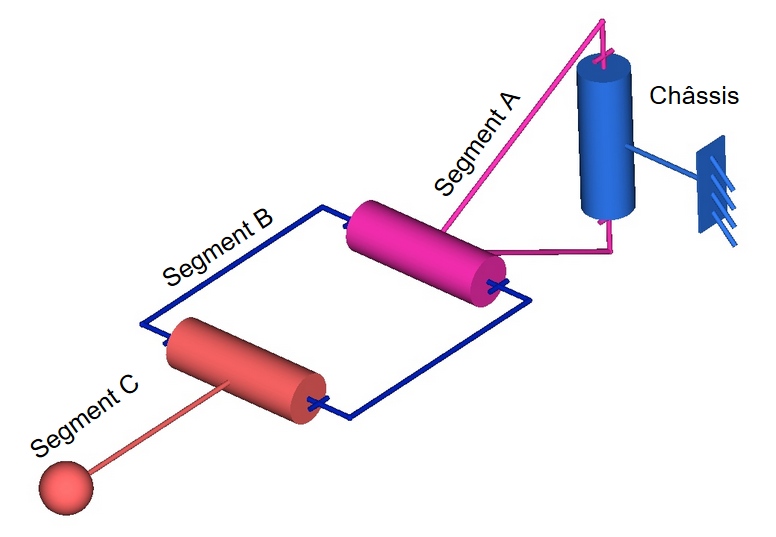
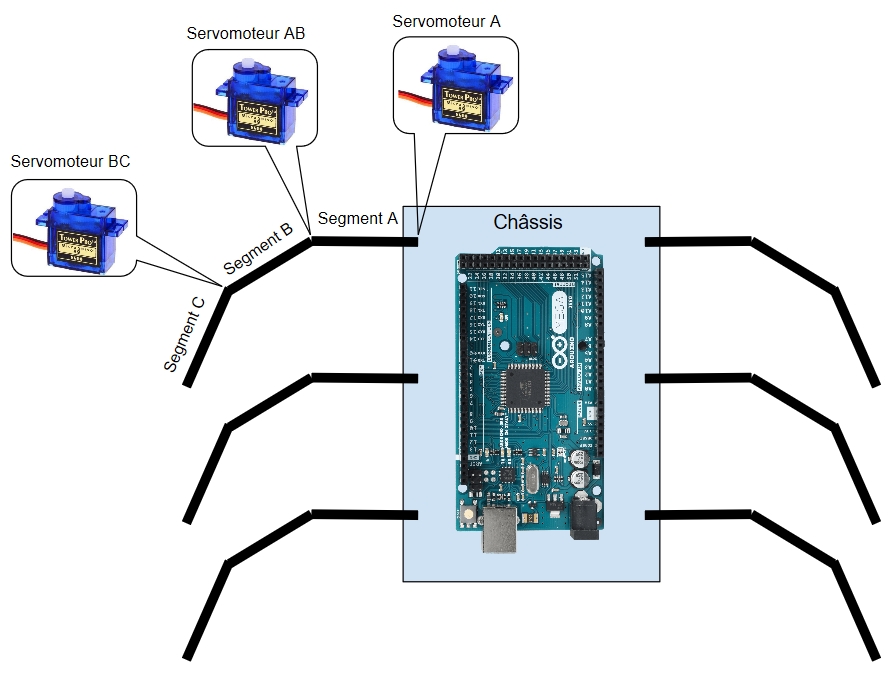
Une première réflexion a abouti sur la structure ci-contre pour le prototype du robot. Les trois articulations par pattes, entre châssis et segment A et entre segments (A-B et B-C), seront réalisées par des servomoteurs SG90. Trois servomoteurs sont donc nécessaires par patte du robot. Remarque importante : pour simplifier la conception (et en raison de l'absence des segments Coxa et Trochanter), le segment A ne pourra pivoter que sur le plan horizontal, il sera donc en simple liaison pivot avec le châssis. Voir vidéo ci-dessous.
|
Schéma de la structure du prototype
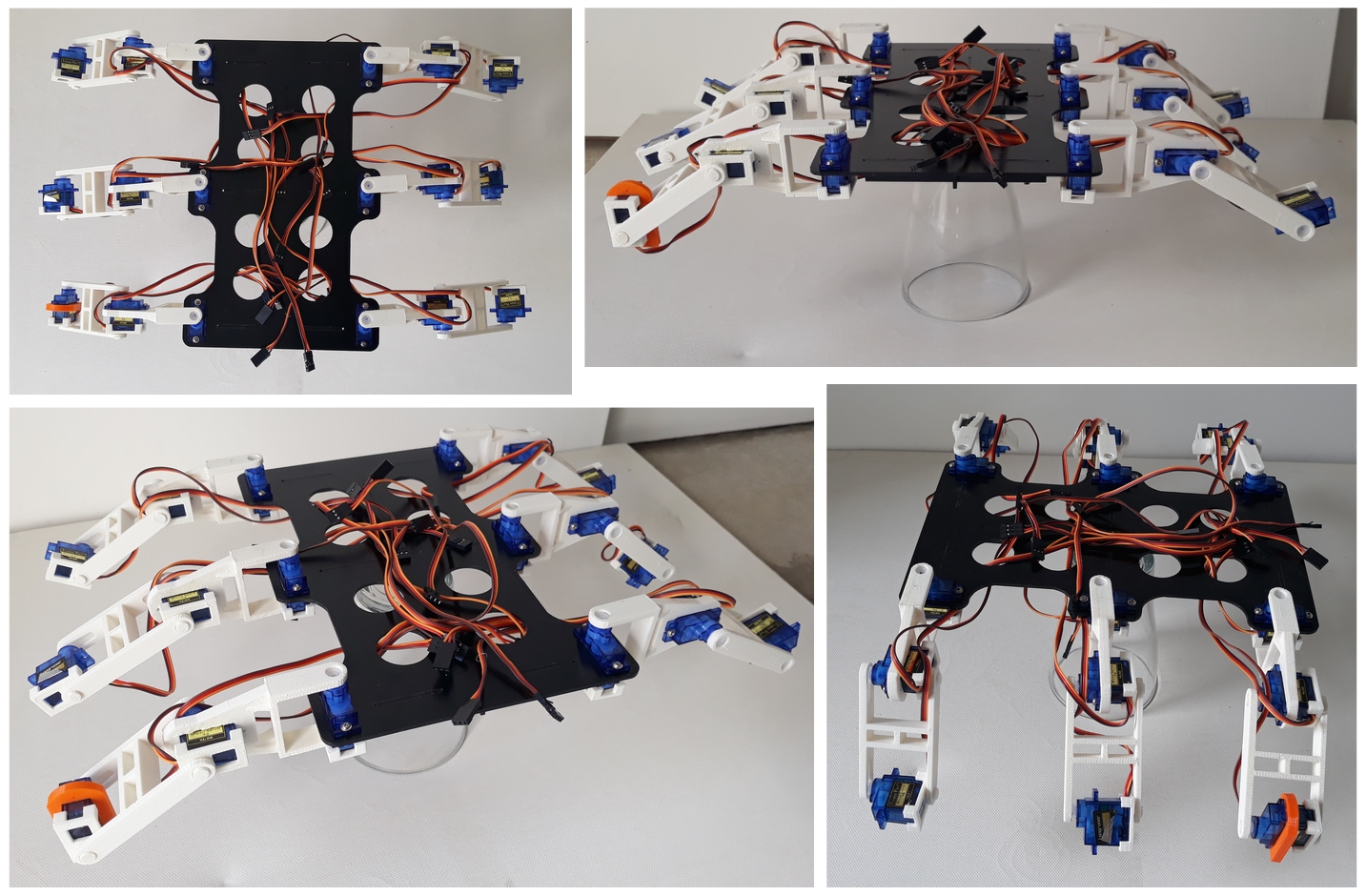
Photos de la structure incomplète du prototype
|
||||
En îlot :
|
1- A partir de la présentation du servomoteur SG90 donnée en ressources en bas de page 2- A partir de la documentation constructeur du servomoteur SG90 donnée en ressources en bas de page 3- A partir du diagramme des exigences du prototype donné en ressources en bas de page |
||
|
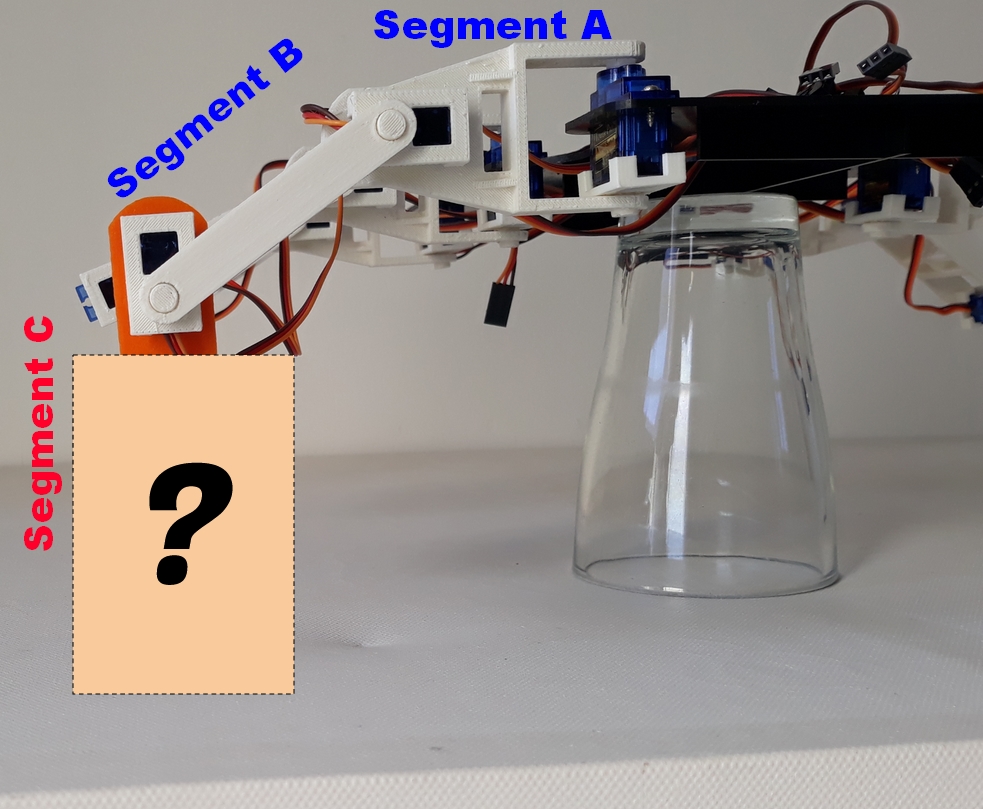
4- Réaliser, sur la feuille donnée par le professeur, le croquis de votre idée pour le segment C d'une des pattes du prototype (partie de la patte en contact avec le sol) en prenant en compte les consignes suivantes :
5- Numériser les différents croquis à l'aide du scanner réseau (voir ressource en bas de page 6- Télécharger les fichiers de ces croquis dans le dossier "Projet" partagé avec vos Drives. |
|
|
|
7- Insérer une image de tous ces croquis dans votre document élève "Projet 6" (recadrer les images pour un affichage convenable des croquis). |

 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 4. |
Ressources
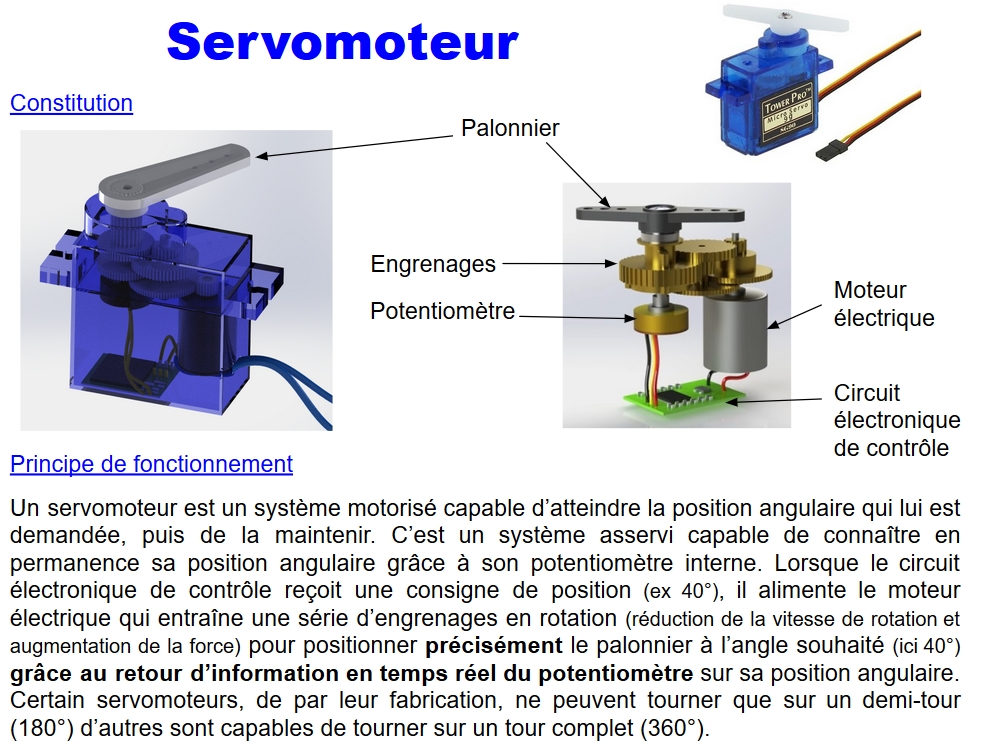
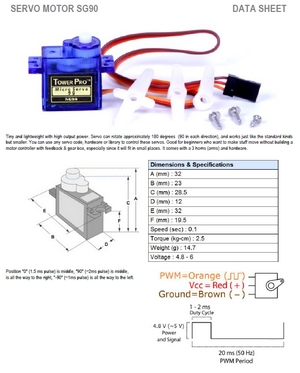
| Servomoteur SG90 : | |
 |
|
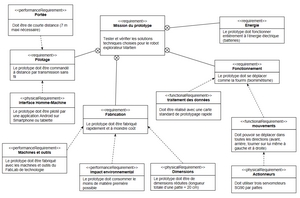
| Diagramme des exigences du prototype (extrait du cahier des charges) : |
|
|
| Numériser un document avec le scanner réseau de la salle T2 : |
|
Au collège, visionner la vidéo depuis T/travail/TechnologiePC/3eme/Projet 6/scannerreseau.mp4 |