|
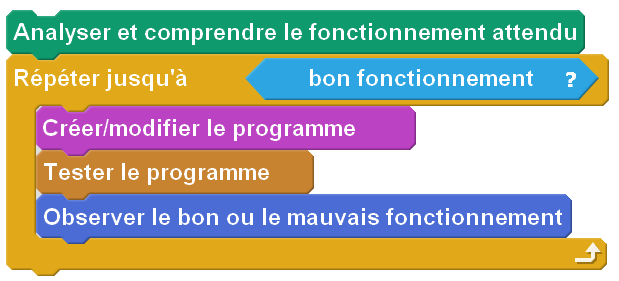
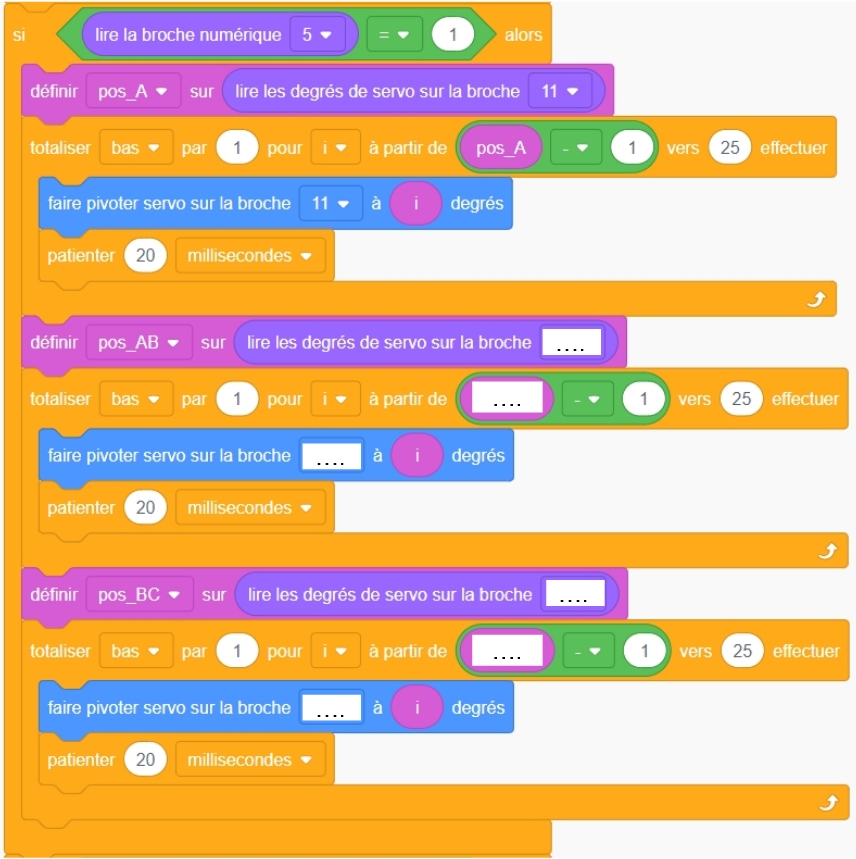
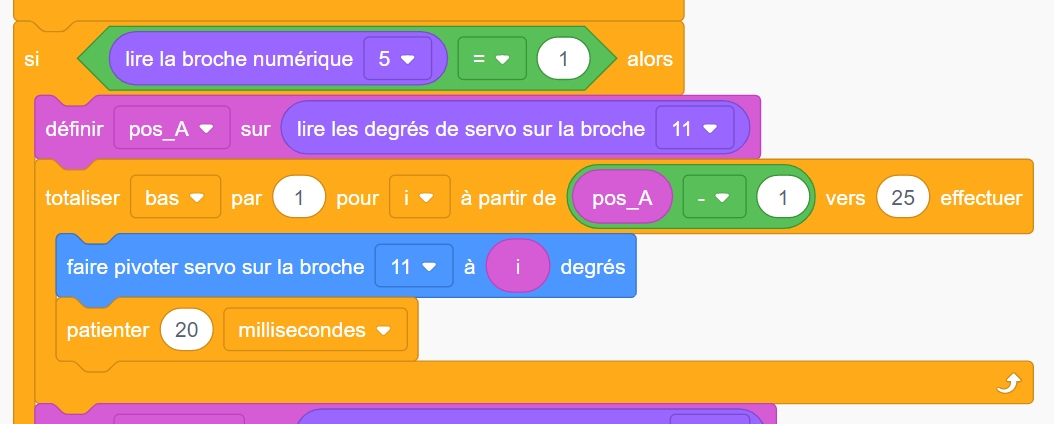
Répéter indéfiniment
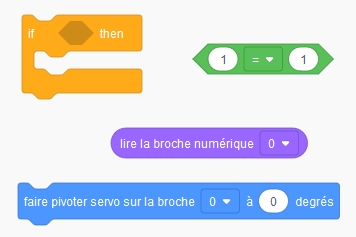
Si la broche numérique PIN ..inchangé.. est égal à l’état logique 1
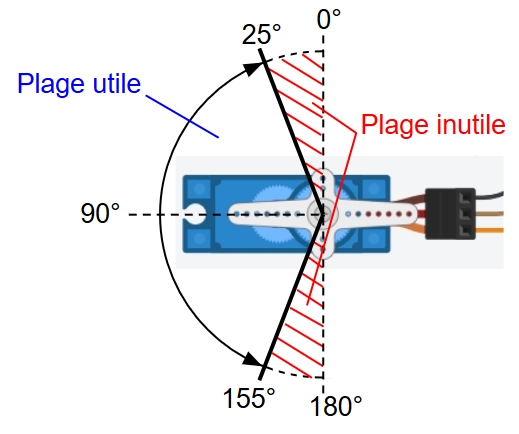
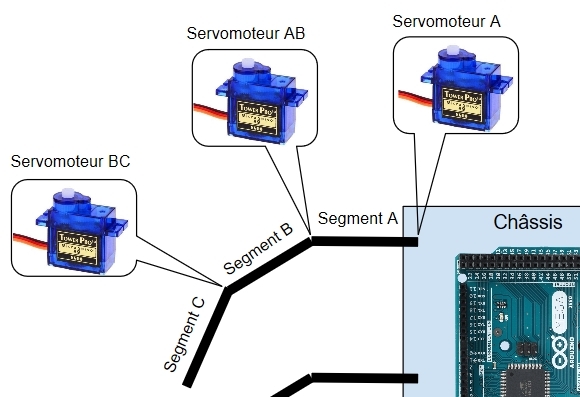
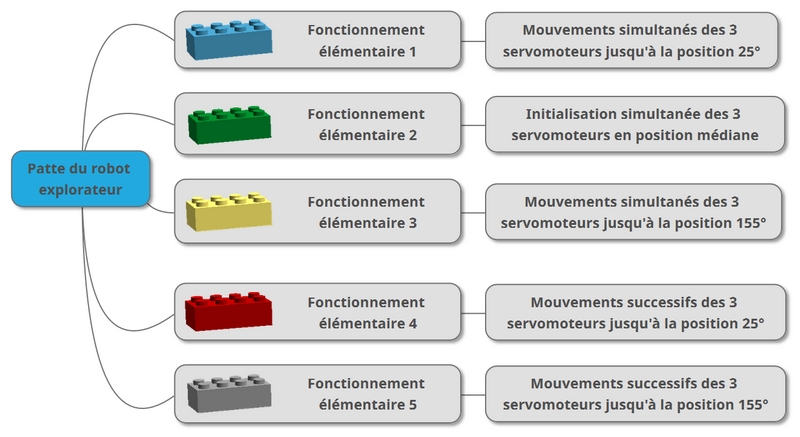
Alors faire pivoter le servomoteur A sur la broche numérique PIN ..inchangé.. à 25°
faire pivoter le servomoteur AB sur la broche numérique PIN ..inchangé.. à 25°
faire pivoter le servomoteur BC sur la broche numérique PIN ..inchangé.. à 25°
Fin SI
Si la broche numérique PIN ..inchangé.. est égal à l’état logique 1
Alors faire pivoter le servomoteur A sur la broche numérique PIN ..inchangé.. à ..inchangé..°
faire pivoter le servomoteur AB sur la broche numérique PIN ..inchangé.. à ..inchangé..°
faire pivoter le servomoteur BC sur la broche numérique PIN ..inchangé.. à ..inchangé..°
Fin SI
Si la broche numérique PIN ... est égal à l’état logique 1
Alors faire pivoter le servomoteur A sur la broche numérique PIN ... à 155°
faire pivoter le servomoteur AB sur la broche numérique PIN ... à 155°
faire pivoter le servomoteur BC sur la broche numérique PIN ... à 155°
Fin SI
Fin répéter indéfiniment
|