Etape 5 - Etude d'un capteur : codeur linéaire du robot Robosapien V2
En îlot
|
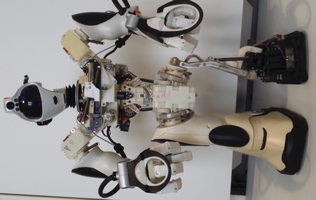
1- Demander au professeur une mise en situation du codeur linéaire sur le robot Robosapien V2 présent dans la salle.
Réaliser le travail des trois phases ci-dessous |
|||||


Phase 1
|
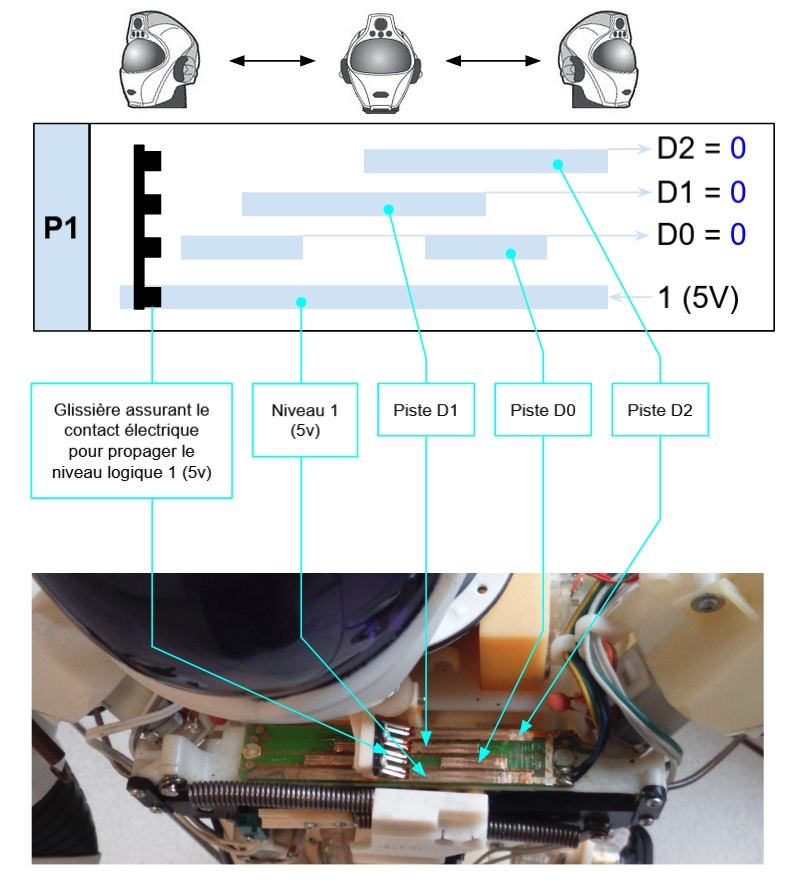
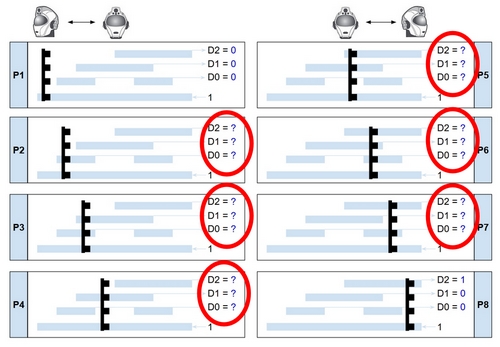
2- Sur le document "Codeur cou" situé dans le dossier partagé avec vos Drive "Activité 21 - 3emeYilotZ", compléter les états logiques (0 ou 1) des sorties (D0, D1 et D2) du codeur linéaire pour les positions P2 à P7 de la tête du robot (les positions P1 et P8 sont données, une description du codeur linéaire est donnée ci-dessous).
|
|||||||||
Phase 2
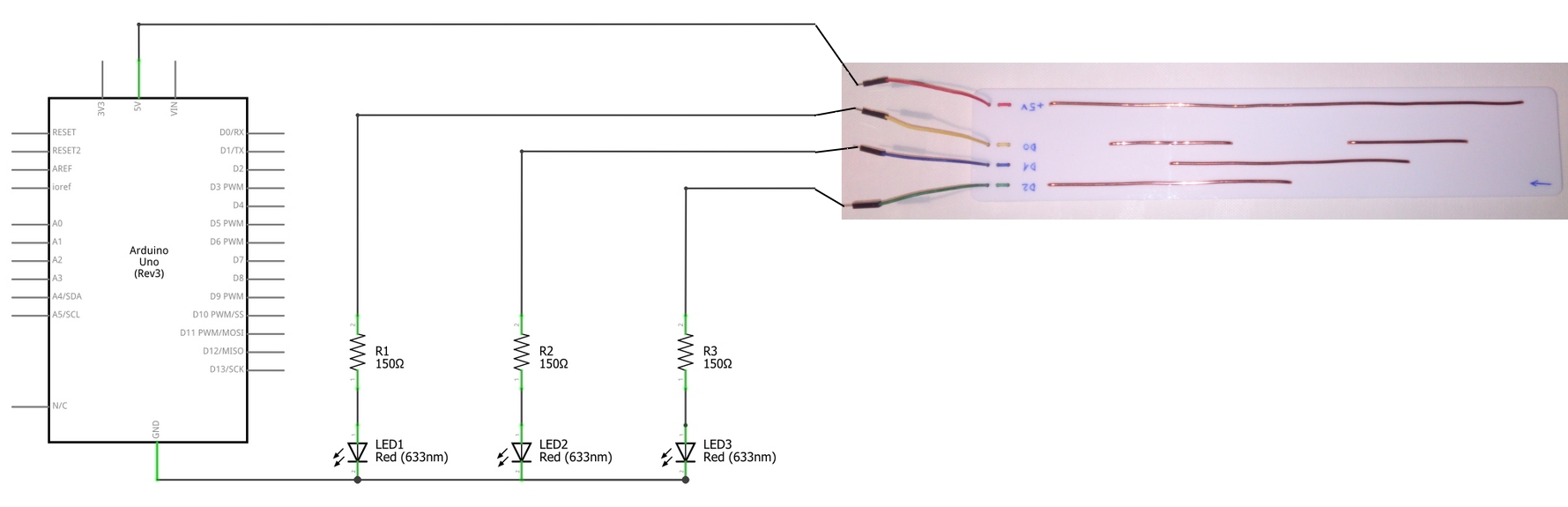
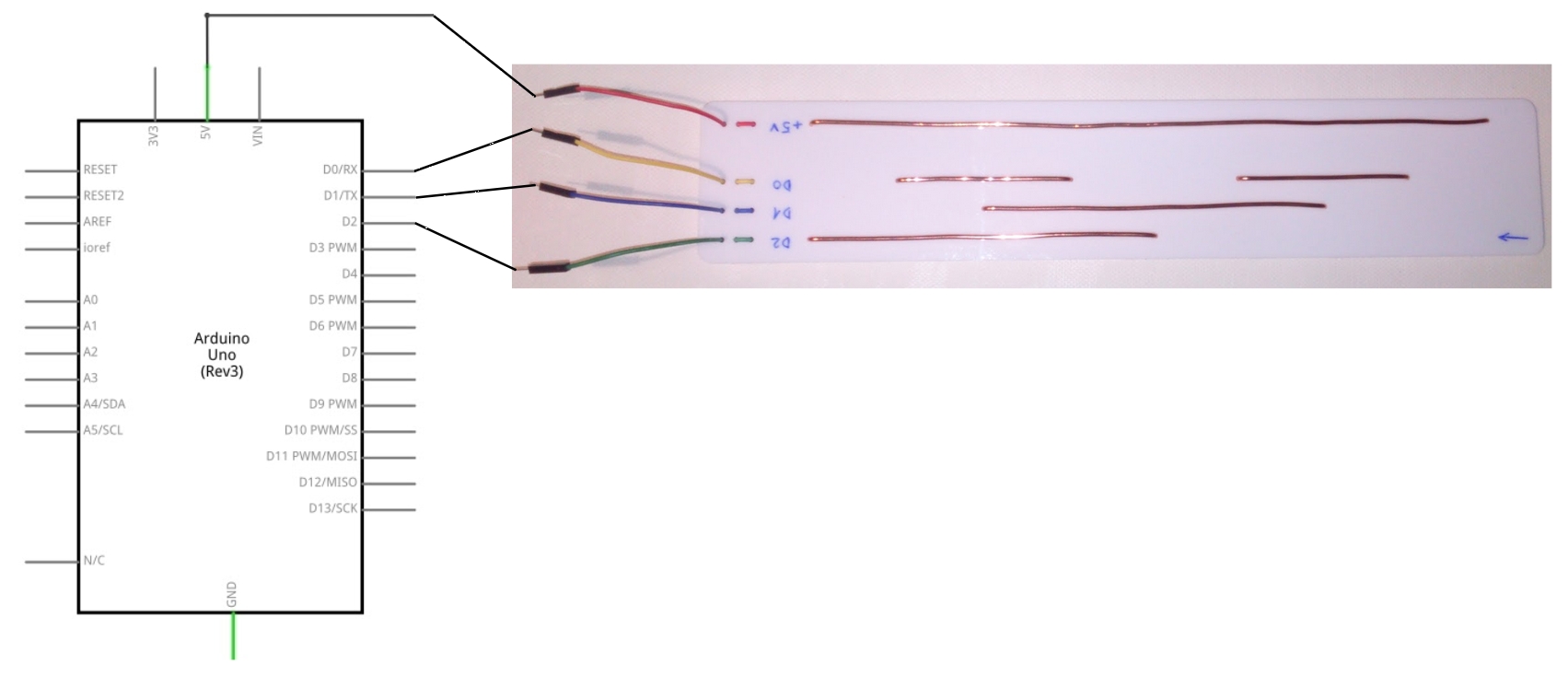
3- Réaliser le montage correspondant au circuit électronique donné ci-dessous (ici, la carte Arduino sert uniquement d'alimentation 0V(GND) +5V pour le circuit).
4- Faire valider le montage par le professeur et demander sa mise sous tension. 5- Vérifier par expérimentation (faire glisser le tube sur la plaque dans le sens de la flèche pour une rotation de la tête du robot de la position P1 à la position P8) les réponses de la question 2 portées sur le document "Codeur cou". Corriger le document "Codeur cou" si nécessaire.
6- Faire valider vos résultats par le professeur. 7- Insérer dans votre document élève "Activité 21" une capture d'écran du document "Codeur cou". 8- En fonction des résultats précédents, indiquer si le signal délivré par le codeur linéaire est un signal logique (numérique), numérique ou analogique.
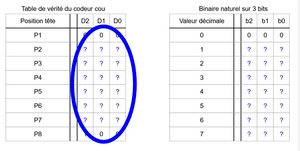
9- A partir des résultats du document "Codeur cou" corrigé à la question 5, compléter la table de vérité du codeur cou en donnant l'évolution du code binaire pour chacune des positions de la tête du robot (document "Table de vérité du codeur cou" situé dans le dossier partagé avec vos drive" Activité 2-1 îlot X"). Zones à compléter du document "table de vérité du codeur cou"
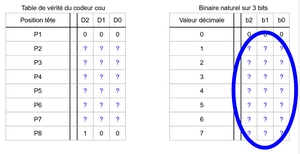
10- Compléter le code binaire naturel sur trois bits donné dans le document "Table de vérité du codeur cou" situé dans le dossier partagé avec vos drive" Activité 2-1 îlot X". Possibilité de revoir en ressources en bas de page Zones à compléter du document "table de vérité du codeur cou"
11- Le codeur cou délivre un code binaire différent du binaire naturel (comparer les tables de vérité précédemment complétées sur le document "table de vérité du codeur cou"). Il s'agit du code binaire réfléchi (ou code Gray) qui présente la particularité de n'avoir qu'un seul bit qui change d'état au moment du passage d'une combinaison binaire à la suivante. Rechercher sur internet quel avantage est procuré par l"utilisation du code Gray pour les codeurs de positions (à rédiger dans votre document élève Activité 2-1, pas de copier-coller). 12- Faire valider vos résultats par le professeur. 13- Insérer dans votre document élève "Activité 21" une capture d'écran du document "Table de vérité du codeur cou". |
||||||||||||||||||||||||||||||||




Phase 3
|
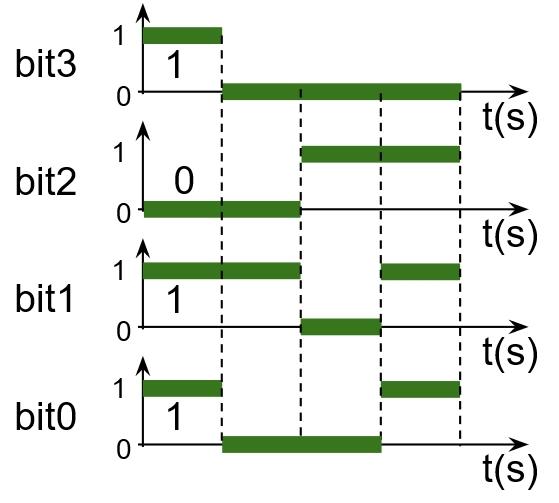
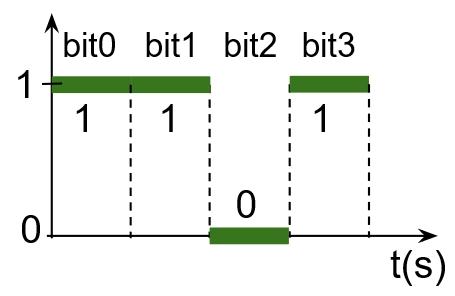
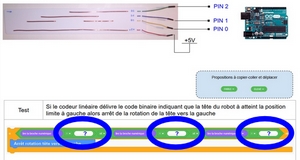
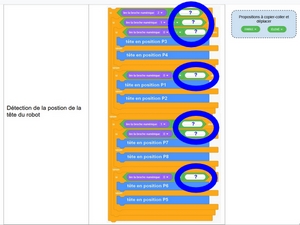
14- Les entrées de la carte Arduino les plus appropriées pour recevoir les signaux délivrés par le codeur linéaire sont les entrées numériques (PIN 0 à PIN 13) car elles ne détectent que deux états (Haut et Bas). Dans le cas où le codeur linéaire serait raccordé sur les entrées PIN 0 à PIN 2 (voir schéma ci-dessous), compléter les programmes des documents "Programme 1 et codeur linéaire" et "Programme 2 et codeur linéaire" situés dans le dossier partagé avec vos Drive "Activité 21 - 3emeYilotZ" (copier-coller les propositions sur les bons tests). Rappel ci-dessous sur les différents états logiques.
15- Faire valider vos résultats par le professeur. 16- Insérer dans votre document élève "Activité 21" une capture d'écran des deux documents "Programme 1 et codeur linéaire" et "Programme 2 et codeur linéaire". |
|||||||||
 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 5. |
Ressources
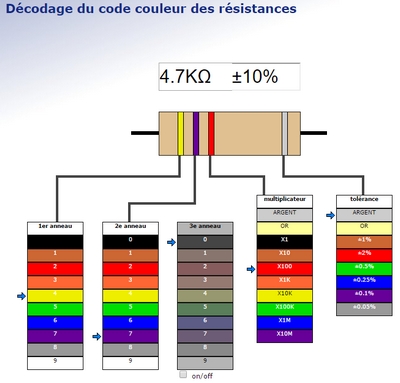
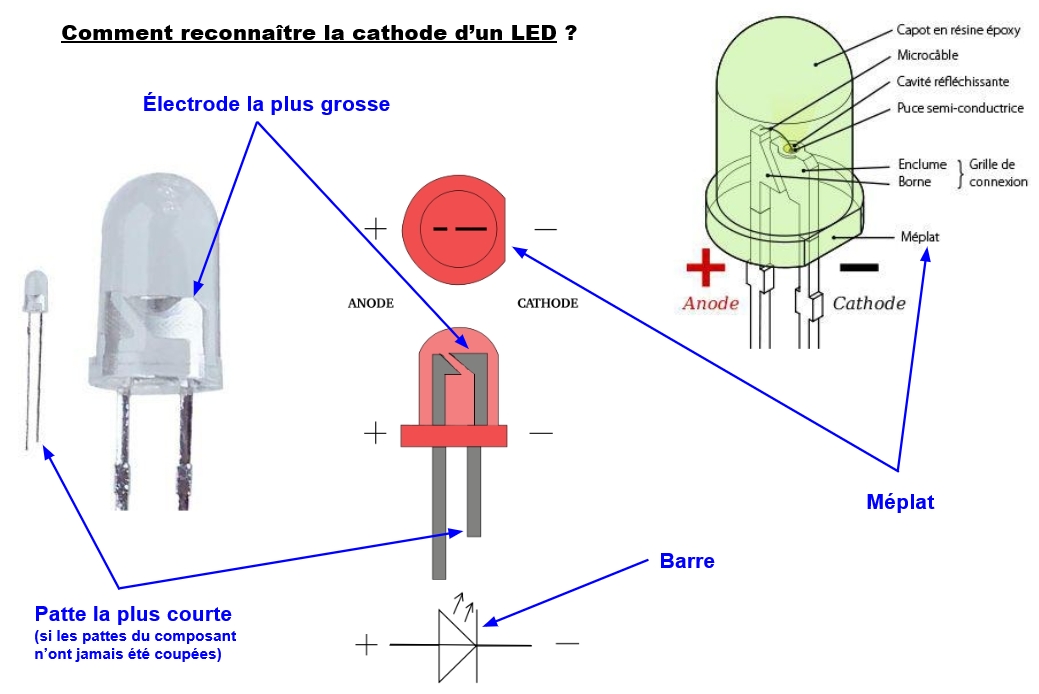
| Lire la valeur ohmique d'une résistance : code des couleurs | Reconnaître la cathode d'un LED : |
|
Source : www.electronique-radioamateur.fr |
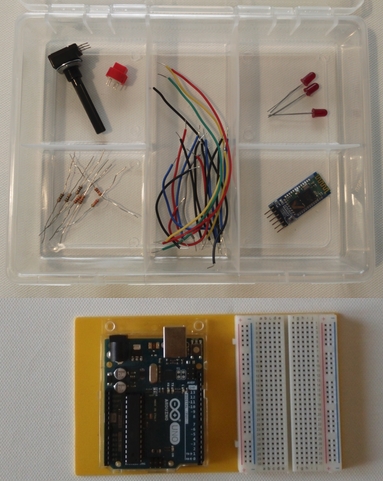
Montage photo (sources : www.avacasbl.be ; www.sen.tabesi.over-blog.fr) |