Etape 6 - Capteurs et actionneurs du robot Robosapien V2
En îlot
|
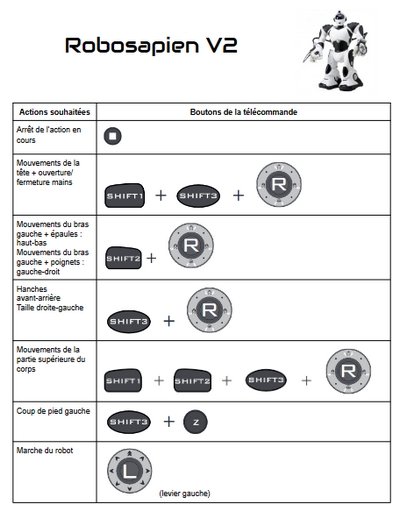
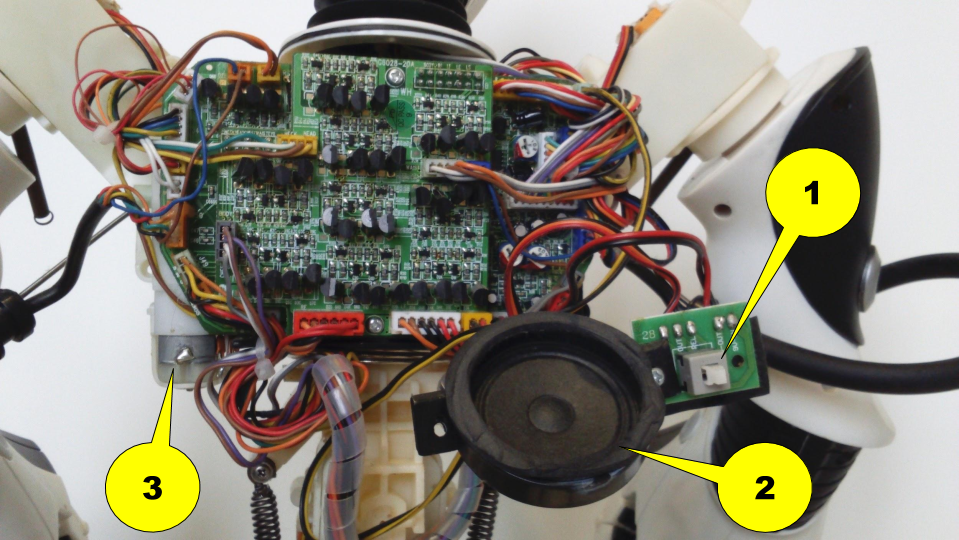
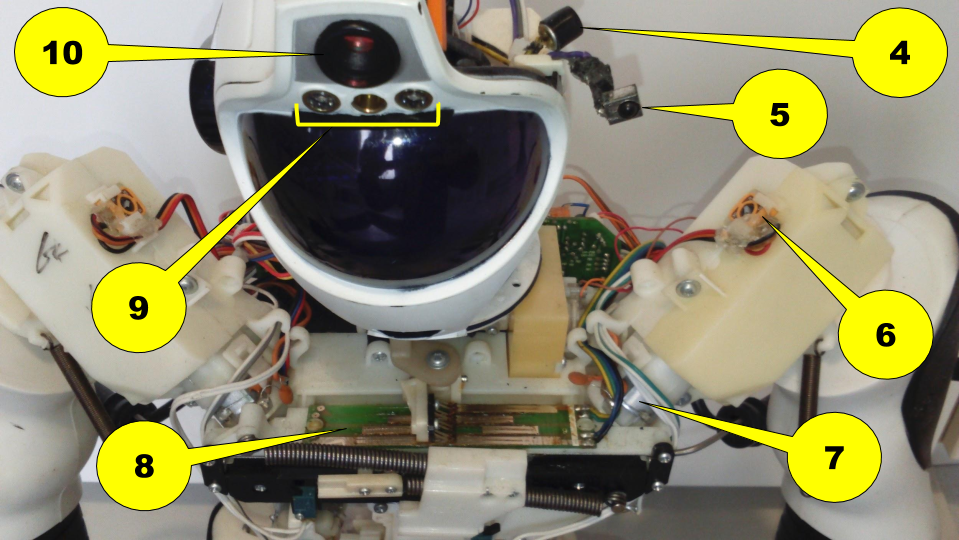
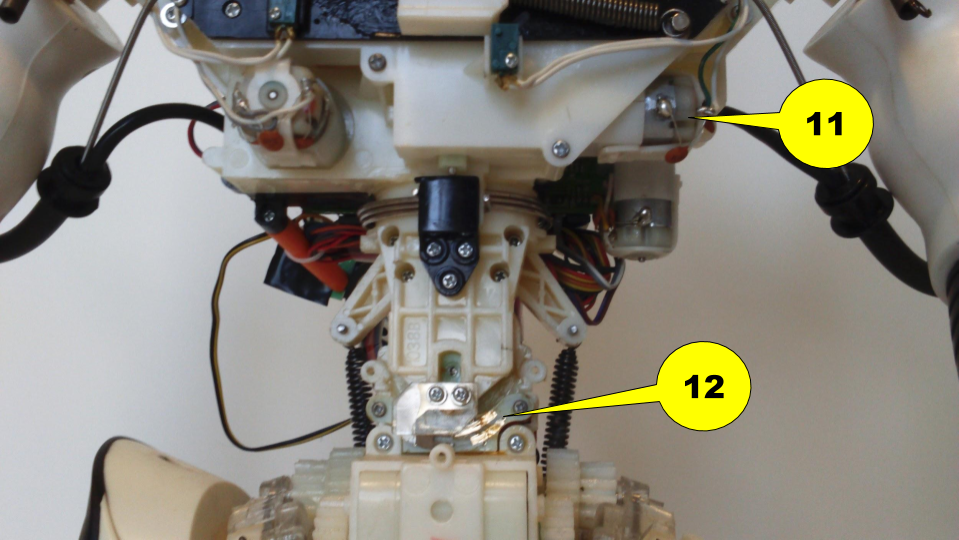
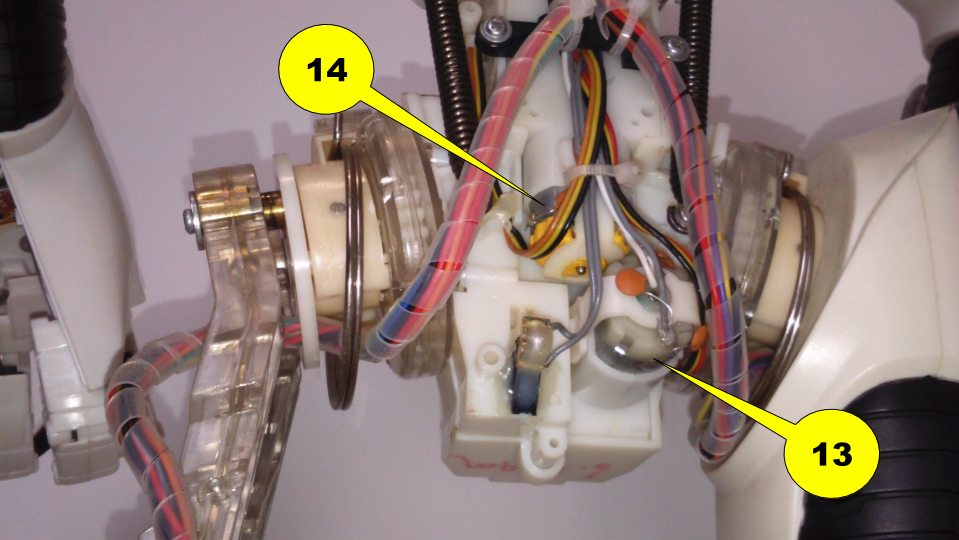
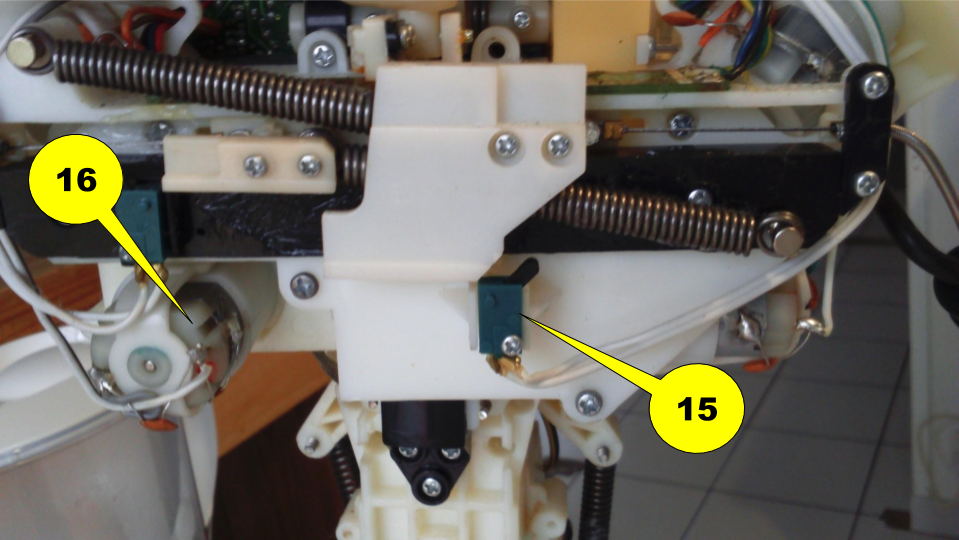
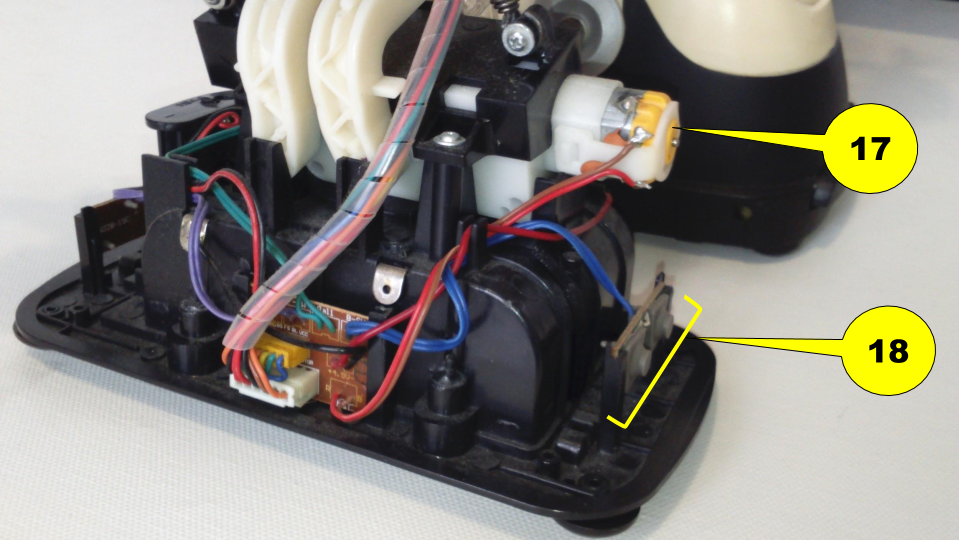
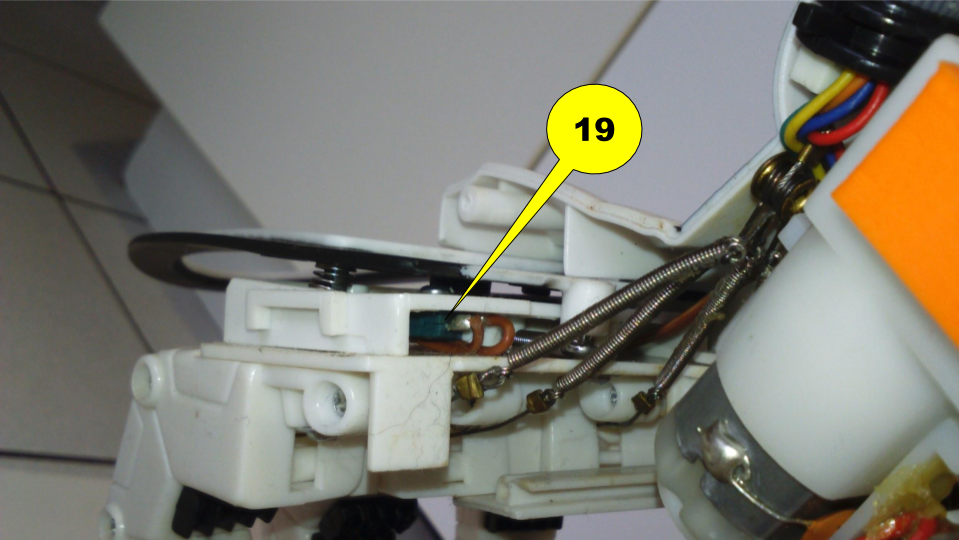
1- Classer les constituants du robot Robosapien V2 listés ci-dessous dans leur catégorie CAPTEUR ou ACTIONNEUR (à présenter sous la forme d'un tableau dans votre document élève "Activité 21") : si nécessaire, possibilité de revoir les documents du travail préparatoire en bas de page - bouton Marche/Arrêt - détecteur de choc avant pied gauche - détecteur de choc arrière pied gauche - moteur jambe gauche - détecteur infrarouge de télécommande - moteur rotation main gauche - codeur rotation tête - détecteur de proximité infrarouge - moteur inclinaison taille droite/gauche - détecteur inclinaison taille droite/gauche - moteur inclinaison taille avant/arrière - microphone - moteur rotation haut du corps - potentiomètre rotation bras gauche - moteur rotation bras gauche - potentiomètre rotation main gauche - moteur rotation main gauche - détecteur de choc main gauche - caméra couleur - haut-parleur - moteur rotation tête + ouverture/fermeture main gauche et droite - détecteur présence objet dans main gauche (la main ne se referme pas) 2- A partir de l'extrait de la notice d'utilisation donnée ci-dessous, d'observations directes sur le robot Robosapien V2 présent dans la salle et d'observations de son fonctionnement (manipulations et essais raisonnés sous la responsabilité de l'élève gestionnaire), associer à chacun des capteurs et actionneurs classés précédemment le numéro permettant d'identifier sa position sur les photos ci-dessous.
|

 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 6. |
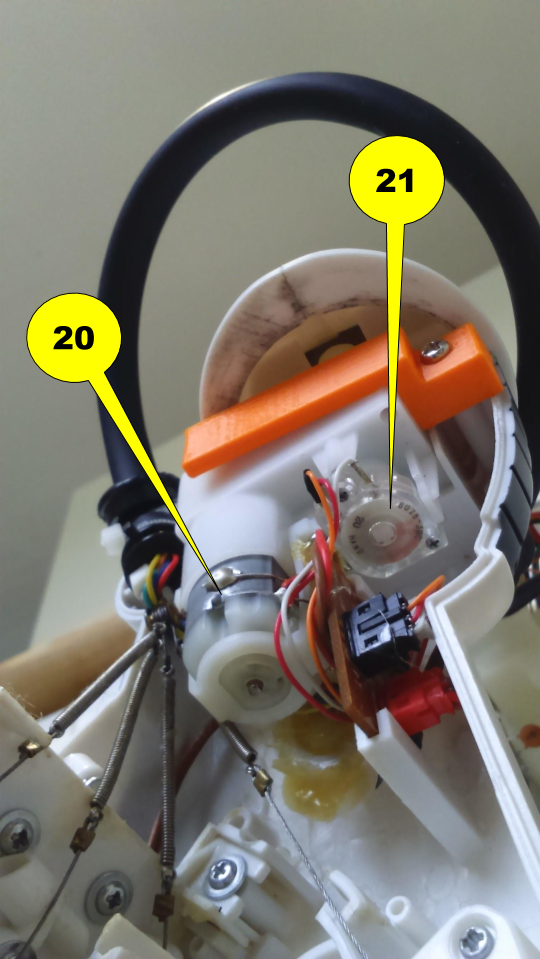
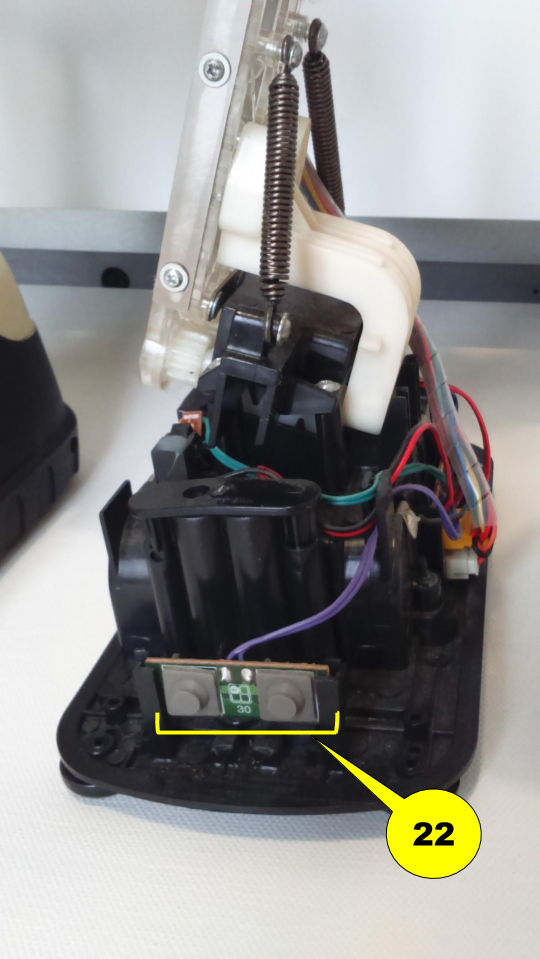
Situation des principaux capteurs et actionneurs du robot Robosapien V2
Besoin de revoir les documents ressources du travail préparatoire sur les capteurs et actionneurs ?