Etape 4 - Vérification des performances de Thymio : distance de détection d'obstacles
En îlot
|
1- Suivre le protocole donné en ressources en bas de page |
 |
|
2- Que pouvez-vous conclure sur la distance de détection des capteurs infrarouges du robot Thymio ? |
 |
 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 4. |
Ressources
|
Protocole : vérification de la distance de détection d'obstacles de Thymio |
|
|||
| Sécurité |
- table d'essai dégagée de tout objet inutile, - privilégier le centre de l'établi comme zone d'essai (parer tout risque de chute du robot), - manipulations raisonnées du robot Thymio, du matériel et des instruments de mesure, - uniquement deux élèves pour réaliser l'expérience (un pour manipuler et commander le robot Thymio, un autre pour mesurer la distance de détection). |
|||
| Matériel |
- un poste informatique avec logiciels Thymio Web Bridge - le robot Thymio et son dongle USB appairée, - un grand établi, - un réglet (50 cm), - une équerre, - obstacles de différentes couleurs, - une feuille de test. |
|||
| Conditions |
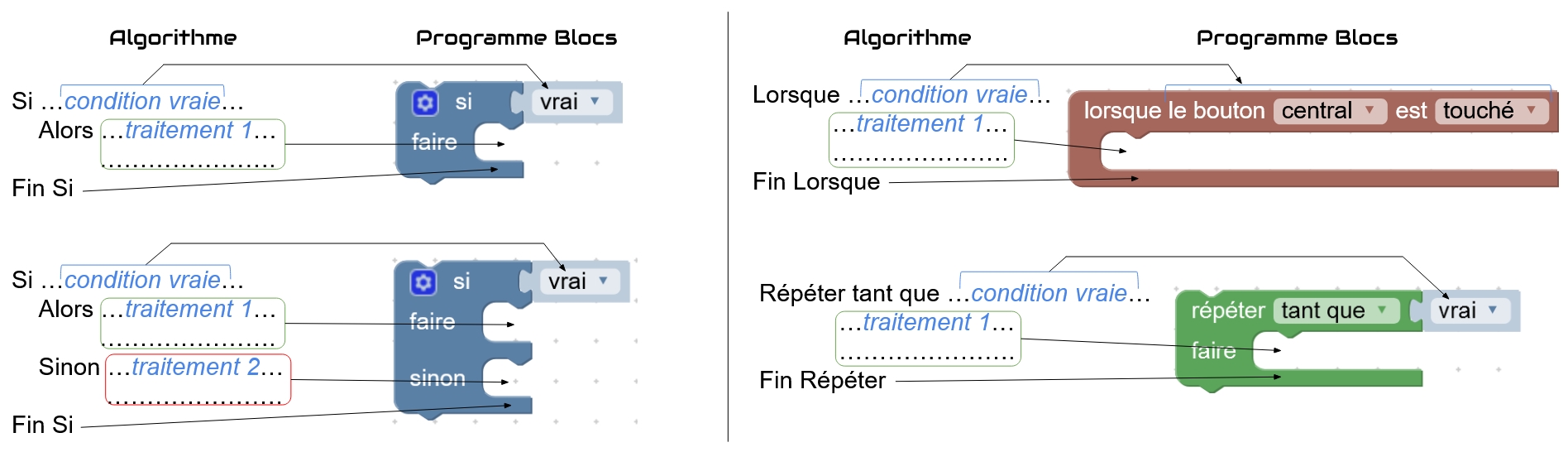
- mesurer la distance d'arrêt du thymio par rapport à l'obstacle pour différentes couleurs d'obstacles, - démarrer le robot Thymio à 20 cm de l'obstacle (dans la direction de l'obstacle, le capteur testé est le capteur infrarouge avant central), - pour limiter l'importance des erreurs de mesures il faut réaliser au moins trois mesures successives permettant de calculer une distance moyenne. - le robot Thymio doit être préalablement programmé suivant l'algorithme ci-dessous :
Mode opératoire pour programmer Thymio ci-contre Mais c'est où Fin si, Fin répéter, Fin lorsque ?
|
|||
| Déroulement (mode opératoire) |
Suivre le DEROULEMENT ci-dessous, à partir du MATERIEL nécessaire, en vous mettant dans les CONDITIONS permettant d'obtenir des résultats fiables, tout en respectant la SECURITE. 0- Programmer le robot Thymio à partir de l'algorithme donné dans les conditons. 1- Préparer la table d'essai :
2- Mesurer trois fois la distance d'arrêt du robot Thymio pour chacun des obstacles de couleur (consigner les mesures dans le tableau du document élève).
3- Calculer pour chacune des couleurs d'obstacles, la distance moyenne à partir des trois valeurs mesurées. |
|||